



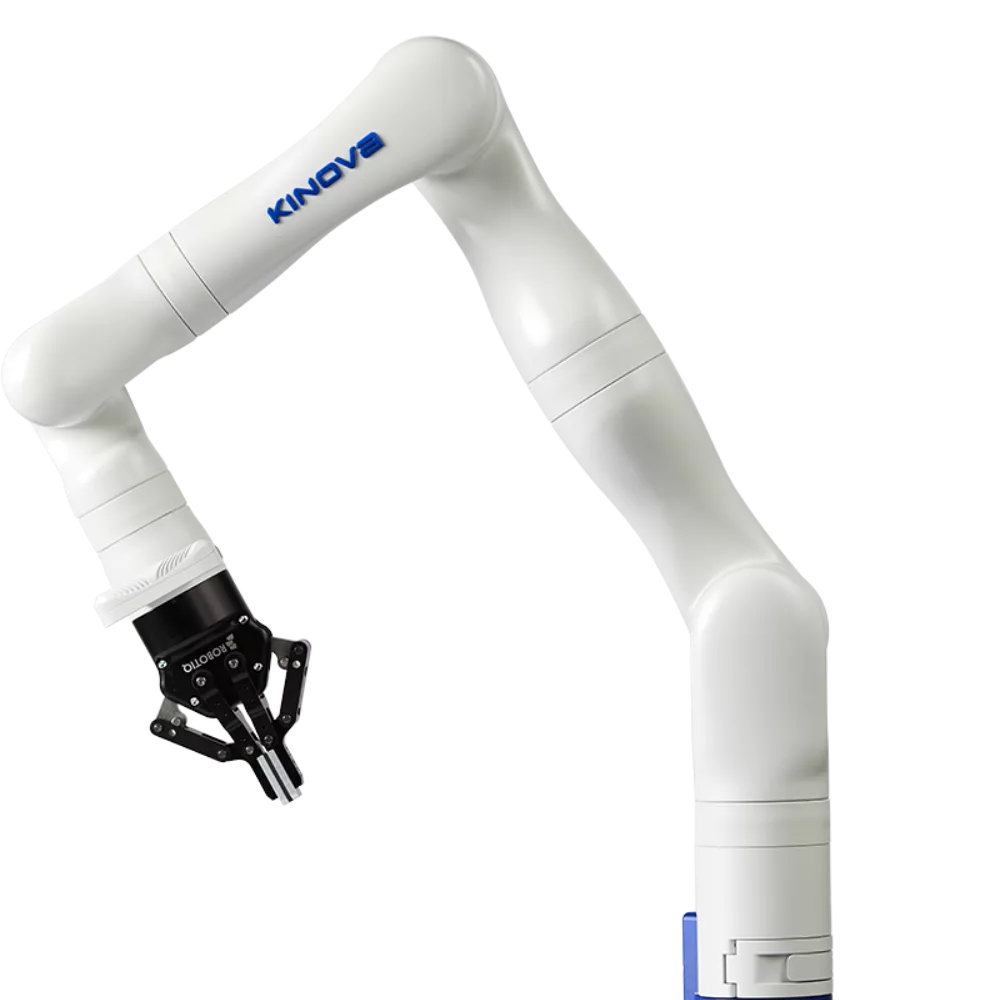
















7DOF Robotic Arm with Gripper
Continuous payload
2.0 kg
Maximum reach
902 mm
Total Weight
8.2 kg
Average Power
36 W
7DOF
Infinite
Actuator joint range

50 cm/s
Maximum Speed
7DOF Robotic Arm with Gripper with specs as below
| Degrees of Freedom | 7DOF |
| Payload | (Full-range continuous without gripper) 2.0 kg |
| (mid-range continuous without gripper) 4.0 kg | |
| Total weight | 8.2 kg |
| Maximum reach | 902 mm |
| Maximum Cartesian translation speed | 50 cm/s |
| Actuator joint range | Infinite |
| Power supply voltage | 18 to 30 VDC, 24 VDC nominal |
| Average power | 36 W |
| Ingress protection | IP33 |
| Operating temperature | -30 °C to 35 °C |
| Sensors | Torque, position, current, voltage, temperature, accelerometer and gyroscope |
Interfaces
| Internal communications | 2 x 100 Mbps Ethernet |
| API compatibility | Window S10, Linux Ubuntu 18.04, ROS Melodic |
| Programming languages | C++, Python and MATLAB |
| Base interfaces | USB, Ethernet, HD MI, Wi-Fi, Digital I/O |
| End effector interfaces | RS-485, Ethernet, GPIO, PC, UART, 24 V supply @1 A |
| Control system frequency | 1kHz |
| Low-level control | Position, Velocity, Current, Torque |
| High-level control | Cartesian position/velocity, joint position/velocity, force, torque |
| Color sensor | Cartesian position/velocity, joint position/velocity, force, torque, Focusing range: 30 cm to infinity |
| Depth sensor (Intel® RealSense™) | Resolution, frame rates (fps), field of view (FOV): up to 480 x 270 (16:9) @ upto 30 fps; FOV 72 +/- 3° (diagonal), Minimum depth distance (min-Z): 18cm |

2 Finger Gripper
| Degrees of Freedom | 7DOF |
| Payload | (Full-range continuous without gripper) 2.0 kg |
| (mid-range continuous without gripper) 4.0 kg | |
| Total weight | 8.2 kg |
| Maximum reach | 902 mm |
| Maximum Cartesian translation speed | 50 cm/s |
| Actuator joint range | Infinite |
| Power supply voltage | 18 to 30 VDC, 24 VDC nominal |
| Average power | 36 W |
| Ingress protection | IP33 |
| Operating temperature | -30 °C to 35 °C |
| Sensors | Torque, position, current, voltage, temperature, accelerometer and gyroscope |