











- Robots

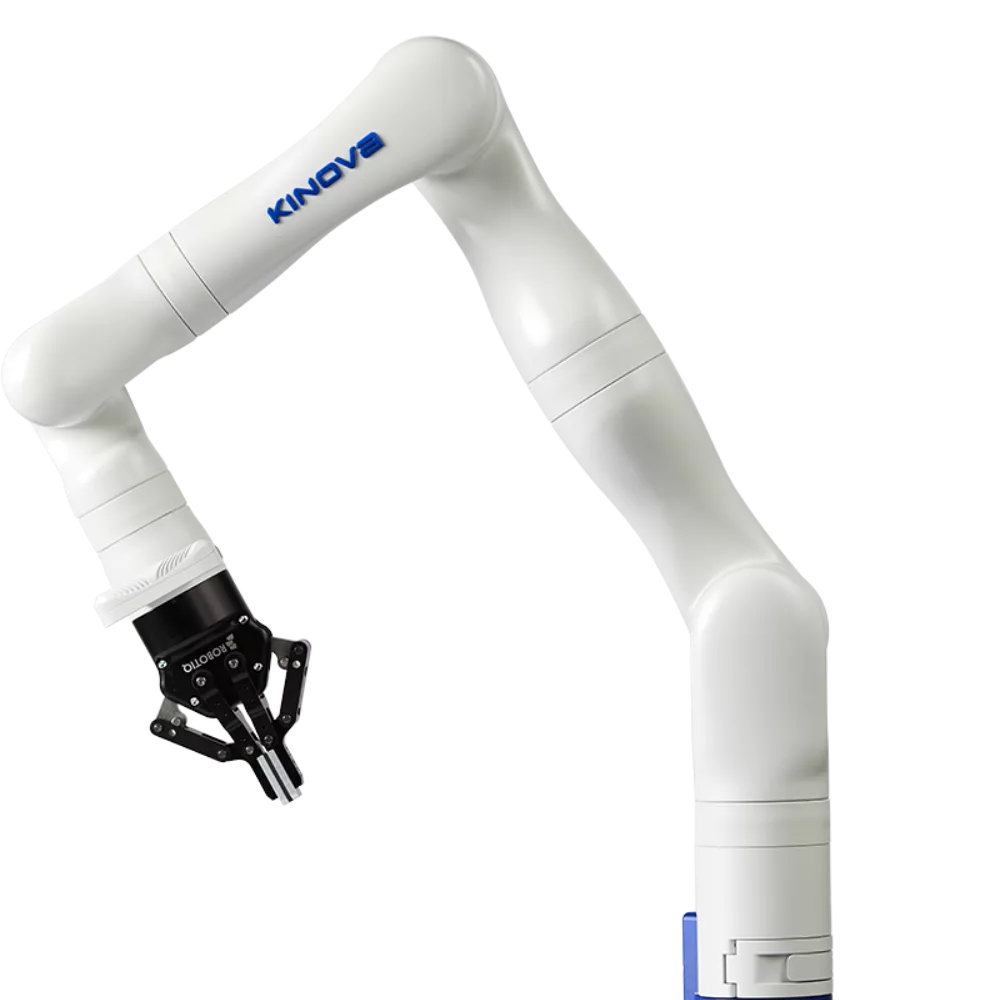
Gen2 robots
JACO² 4 DOF

Gen2 robots
JACO² 6 DOF

Gen2 robots
JACO² 7 DOF

Gen3 Lite Robots
GEN3 LIGHT ROBOT

Accessories
Sensors

Accessories
Computers & Networking

Accessories
Controllers
Accessories
All Accessories
- Seminars
JACO² 4 DOF
JACO² 6 DOF
JACO² 7 DOF
GEN3 LIGHT ROBOT
Sensors
Computers & Networking
Controllers
All Accessories
